>>57745 You gotta start small, make sure you manifest the feeling for some humans to think about ways to make robots for cheap labor and have them think about discovering the Absolute Solver and attempt to harness energies of the unknown to make those drone cores. With a good power source that's light, handy and lasting (and potentially allowing her to come through via techno-magic Eldritch shenanigans i.e. the cores using a bit of her own powers in their construction) then they can make drones that take the form of the workers from the show.
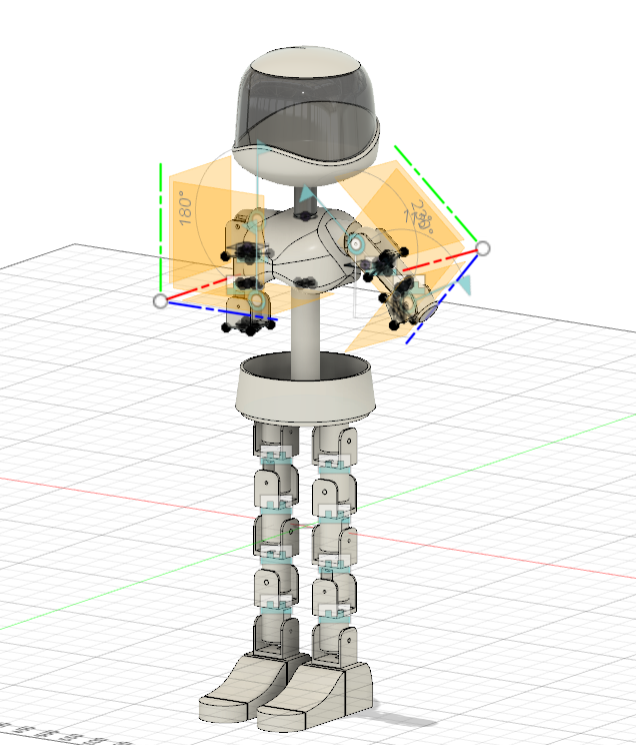
Hello everyone. For the past 5 months or so I've been designing a worker drone. I have finished the designs for the legs torso arms and head. I have almost finished the hand. I need to add a place to put the servomotors that will move the finger tendons and to add another motor to the thumb. I have to redesign some parts and to add clearance but I think I'm almost done with the design phase. I originally wanted to wait until I got the drone to walk and post it on Reddit for 100 updoots but I've grown bored with the design aspect and I want to get to inverse kinematics as soon as possible. I won't stop working on this and I'll keep you updated.
>>165112 Progress update: I made this so far. Soon I'll print the legs and see if I can get them to walk. This design is bad, I know how to improve it but I won't. This is because the amount of effort needed to make a good worker drone is higher than making a disassembly drone, if you want to hear why I think that's the case let me know and I'll break it down. Thus the worker drone will become a test platform. I'll prototype whatever mechanisms I want to put on the dd on the worker drone.
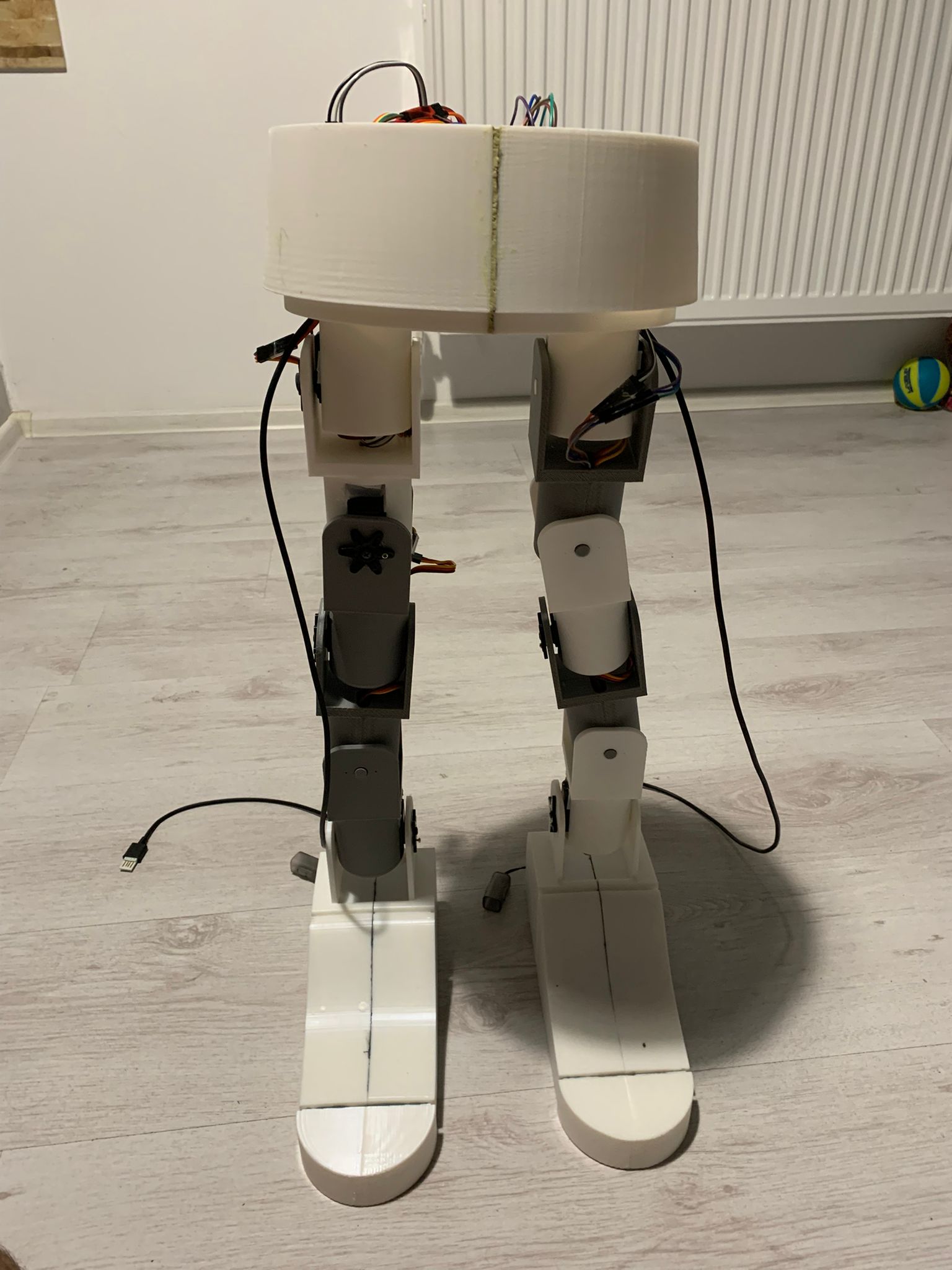
Minor win report. I managed to build the lower body. I learned a few things I'll implement in my future robots. I've tested all the servos, and my calculations were correct, the drone can walk but it probably won’t be able to lift his feet off the ground all that high. What is left to do now is to program a walking demo then design and print the top half. I feel that the latter will be comparatively easy, but perhaps the upper body will be the hard part. There are some improvements I could make to the current design, but they are unimportant
I know you won’t like to hear this, but I won’t be designing DDs anytime soon for the following reasons. 1 I'm a coward. 2 The elbow joint scares me it's too small and I fear I might not be able to design a joint that small 3 Call me selfish but I want to patent my robots, and I suppose copyright interferes with that. Also, the brief amazon copyright episode, where Murder Drones videos were taken down because amazon forgot to disable a default setting, convinced me that if I'm going through all the effort of build a robowaifu. I might as well design her to my exact specifications and avoid complicating myself with legal shit. Not like I think anyone at will take issue with me building J but I prefer to future proof if possible.
>>179818 Sorry I didn't reply as soon as I saw it a few months ago. I was socially anxious, and I wasn't sure what I'll use. To answer your question: 1 arduino mega (I’m using an uno now), 1 raspberry pi 4, 18 20kg/cm rc servos, 20 small blue rc servos, one old display from an old laptop with a ribbon to hdmi converter.